
Eachine Racer 130
A Mini Batman hattyúdala
Mai tesztünk alanya a Tarot TL130H1, akarom mondani az Eachine Racer 130. Hiába no, az Eachine úgy látszik nagy rajongója Steve Jobsnak, aki előszeretettel hangoztatta: “A jó művész másol, a zseniális pedig lop.” :D Annak ellenére, hogy ez a gép már sehol sem kapható, mégis írok róla, mert megtanított a rezgéscsillapítás szükségességére és mivel egy faja kis gépecske, nem hülye ötlet építeni egy hasonlót picit modernebb belsővel.

Mi van a dobozban?
Én az ARF (Almost Ready to Fly) verziót vettem, így töltőt, távirányítót és a hozzá szükséges vevőt nem tartalmazza a doboz. Ezen kívül mindent, sőt még annál is többet.

Az Eachine Racer 130-on kívül kapunk nyolc propellert, hozzájuk tíz gagyi színacél rögzítőcsavart, melyek 1,5mm-es imbuszfejjel vannak ellátva. A csavarokhoz jár egy 1,5mm-es szénacél imbuszkulcs is, amit mindjárt ki is dobhatunk, ugyanis az első használatnál kikopik és átforog a 1,5mm-es csavarfejekben. Azok meg kb. 2-3 ki- és betekerést bírnak ki, aztán cserélhetjük őket M2-es rozsdamentes acélcsavarra. A motorokat 4mm hosszú, a propikat 6mm hosszú csavarok fogják. A propellerek közül a feketék jobbosak (CW), a vörösök pedig Lenin óta balosak (CCW).
Akkumulátorból egy 11,1V-os 450-es, elméletileg 30C-s rettenetet kapunk, ami csak arra elég, hogy kipróbáljuk, hogy forognak a motorok.

Akkurögzítéshez adnak két pár öntapadós tépőzárat és két pár tépőzáras pántot, amit "velcro strap"-ként érdemes keresni a kínai webshopokban.

Van még itt három gyorskötző, hat szivacstalp és végül, de nem utolsó sorban az Eachine Feelcam akciókamera a tartozékaival, ami kimondottan kellemes meglepetést okozott, de erről majd később.
A Racer 130 előkészétése a felszálláshoz
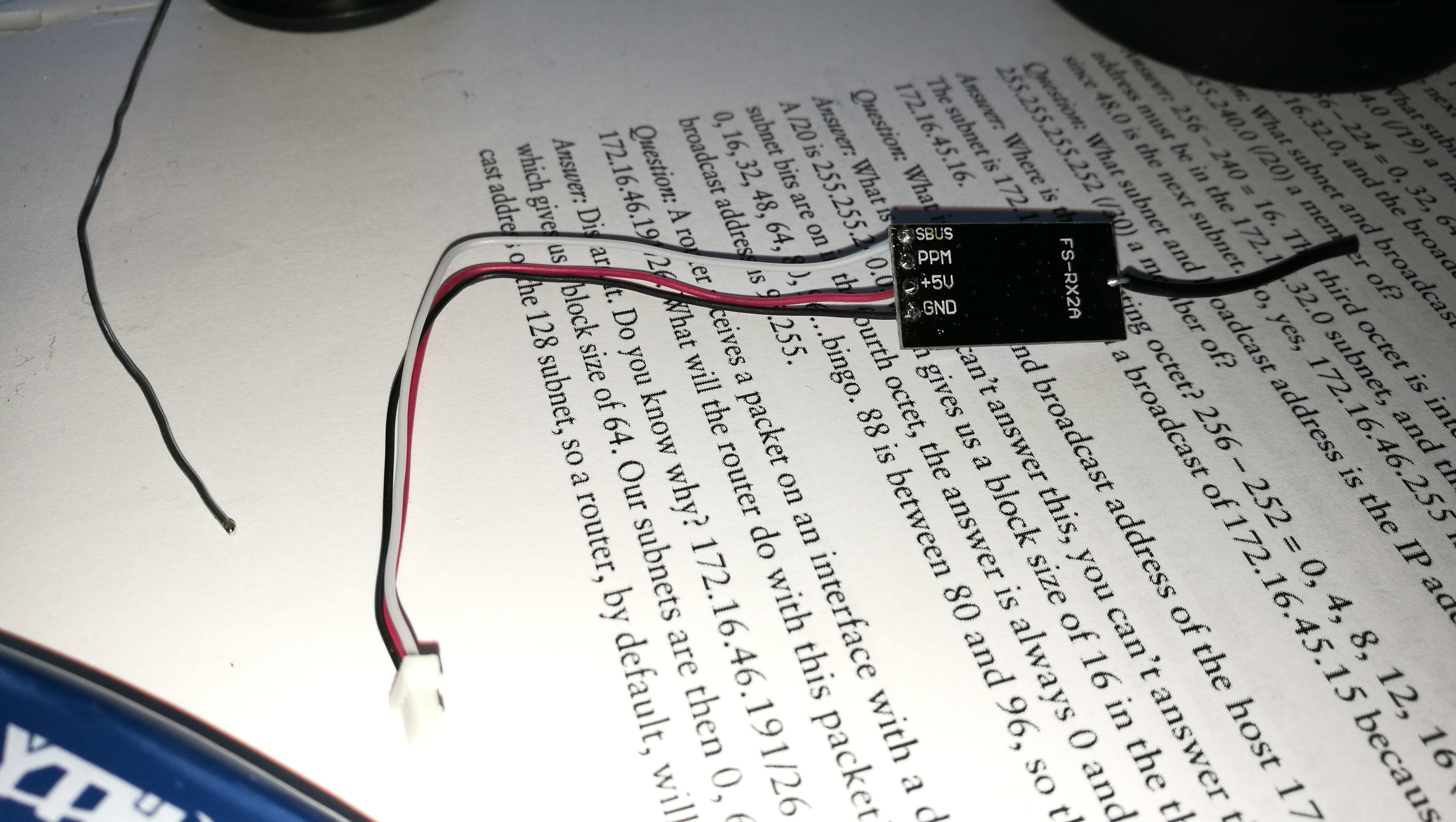
A gép ARF (Almost Ready to Fly), így először egy olyan vevőt kellett kerítenem, ami belefér a gépbe. Először a Flysky A8S-t raktam bele, de annak olyan botrányos a hatótávja, hogy csak pislogtam. Nem volt mit tenni, szegény QX80-ból kiműtöttem az FS-RX2A vevőt, majd rákötöttem az alaplap SBUS-al jelöt portjára, ami az egyetlen kivezetett soros portot, az UART2-őt jelöli. Erre azért volt szükség, mert az A8S kivételével a mostani mikro Flysky vevőkön csak soros porton működik a failsafe, ami nagyon hasznos, ha nem akarjuk, hogy jelvesztéskor kopterunk elrepüljön a fenébe. Érdekelne, hogy a tervezők miért nem vezették ki az UART1-et és az UART2 az SBUS porton miért csak három vezetéket tartalmaz. UART3 nincs, mert a lap Naze32 alapú. Abból is a szerencsétlen rev. 6 amihez az egyik legfinnyásabb giroszkópot pakolták, az MPU6500-at.
Ha PPM / PWM vevőnk van, akkor azt a baloldali portra dughatjuk, és sacc/kb innen hozhatjuk elő az egyik softserial portot, de ezt nem próbáltam ki. Ez azoknak lehet jó hír, akik OSD-re vágynak.

A gépen, ha jól emléxem 1.1-es Cleanflight fuottt, ami manapság már meglehetősen korosnak számít. A 2-es Cleanflight configurator helyből legyalultatná és 2-est rakna fel, de én kíváncsi voltam a gyári beállításokra. Beröffentettem tehát az 1.2.1-es Cleanflight configuratort, és bekonfigoltam a gépet. Régi CF haszánlatához a leírás itt található.
Először megadtam a Cleanflightban, hogy a vevőm serial porton csatlakozik az UART2-őn, Flysky a gyártó a protokoll pedig iBUS. Az iBUS vevőmet hagyhattam iBUS módban, nem kellett SBUS-ra kapcsolni az SBUS port kedvéért. A tíz elérhető csatornához hozzárendeltem az ARM-olást, a beépített csipogót, a repmódokat és az AIR MODE-ot. A gyári csipogó meglepően hangos, nincs miért szégyenkeznie.
A gép ESC-jeinek a motorokhoz kapcsolódó forraszpontjait a fene tudja miért, de szabadon hagyták. Nekem már ért össze két motorvezeték, amitől az ESC vidám füsteregetés mellett leégett. Sajnos épp nem volt folyékony szigetelő kéznél, így a barbár szigetelőszalaghoz folyamodtam. Még felragasztottam a habszivacs talpakat és jöhetett a berepülés.
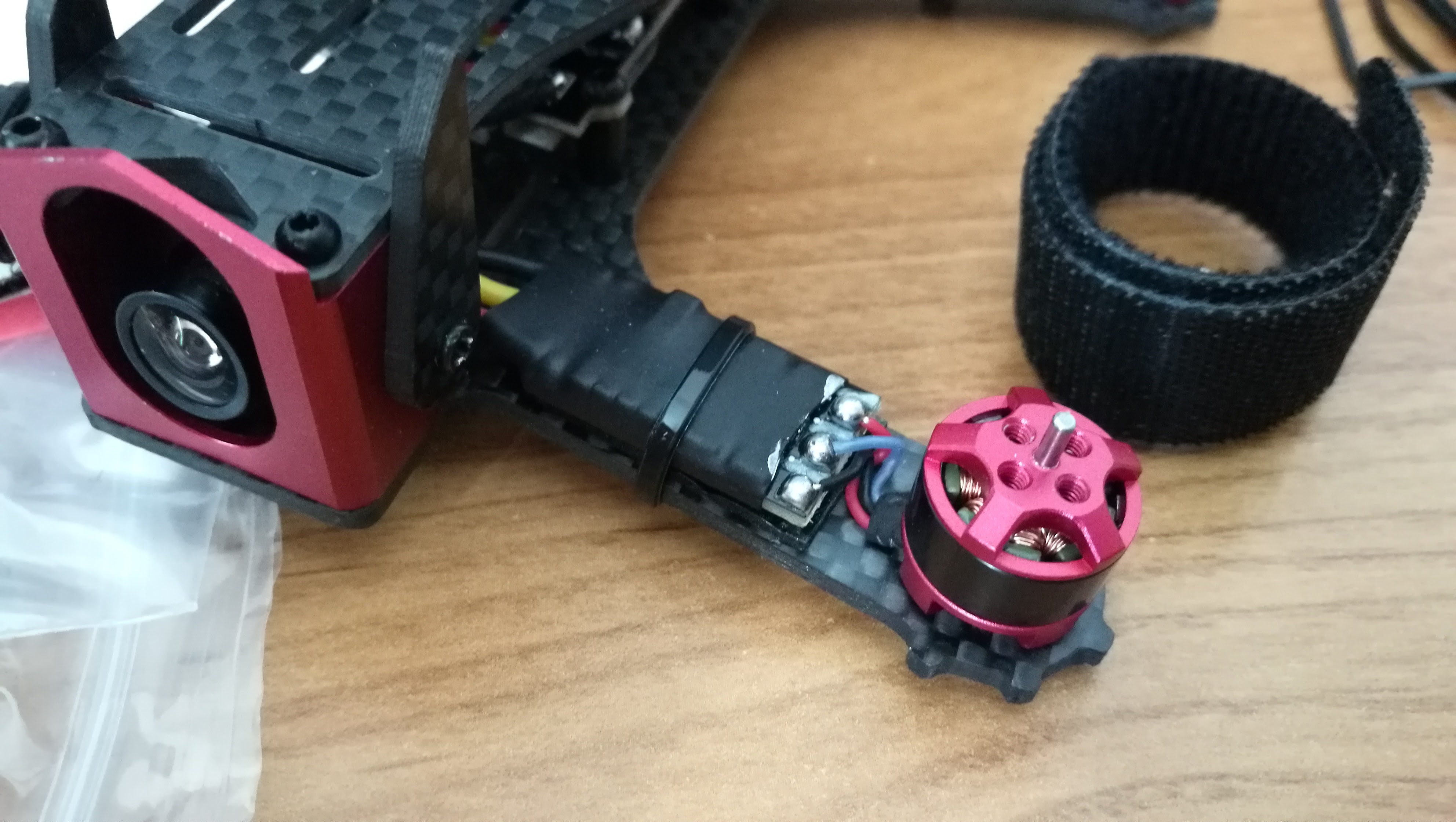 Baloldalt Batman fülek, jobb oldalt szigeteletlen forrasztás.
Baloldalt Batman fülek, jobb oldalt szigeteletlen forrasztás.
Berepülés
A dobozból kikapva a gépet a megreptetésig kb. háromnegyed óra telt el, ami akkutöltés nélkül kb. fél óra lett volna. A gyári akku mellett három 11,1V 600mAh 30C XF power akku várta, hogy sorra kerüljön.

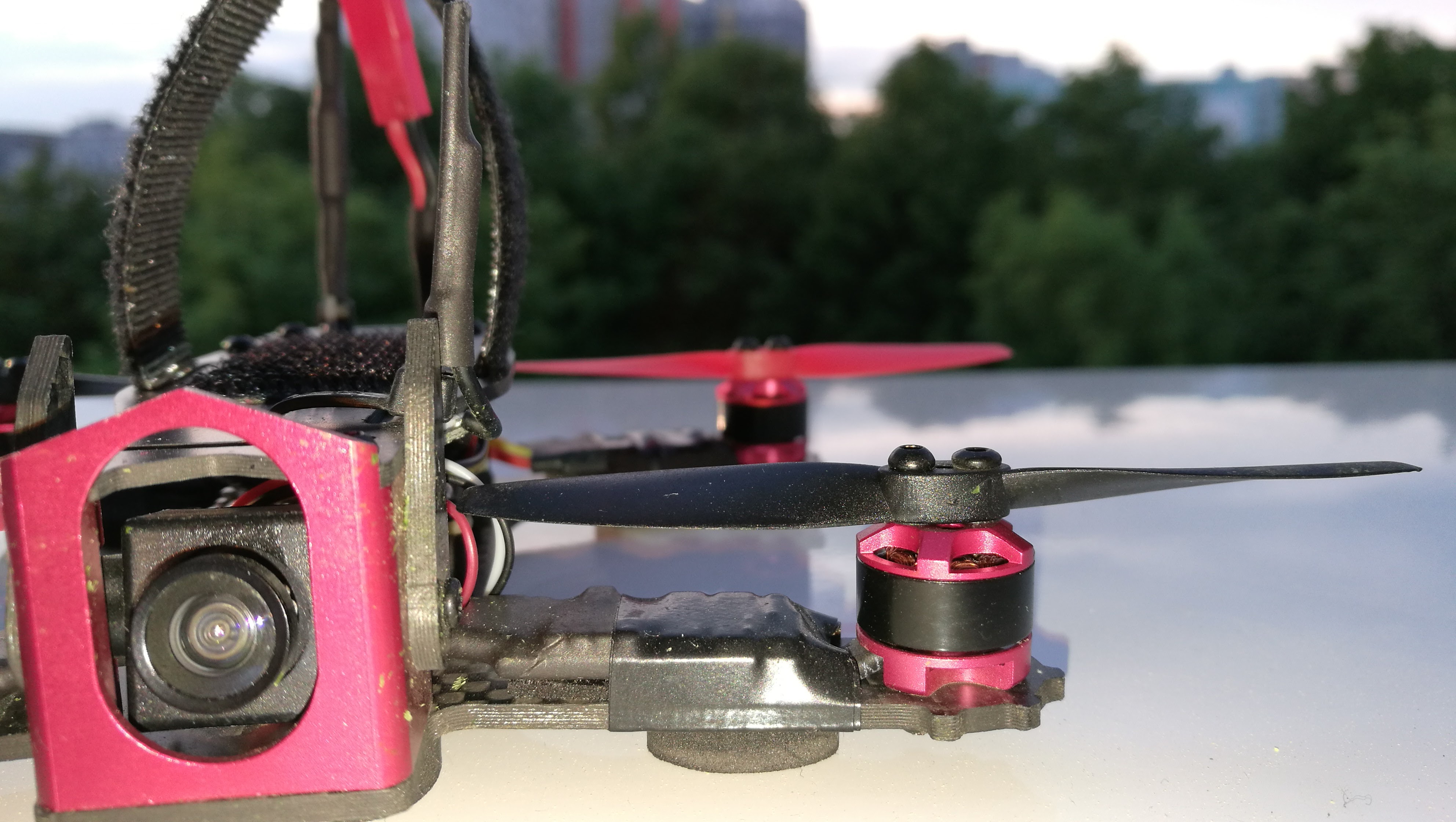
Felraktam az akkut, összepárosítottam a rádióadót a vevővel, megkerestem az FPV headsetemen az adó csatornáját és beállítottam az FPV kamera dőlésszögét kb. 10 fokra a kopter Batman füleivel. Ezek a fülecskék azelőtt fel sem tűntek, de mostmár mindig észreveszem őket és röhöghetnékem támad. :)
Videó Feelcam-mel
A gyári akkuval a gép elég lassú és erőtlen. A Feelcam hiába 9,6g, érződött, hogy a gép erőlködik alatta, éshát az sem segített, hogy a fedélzeti akku táplálja a kamerát. Az egyik repülésem felvettem a Feelcam és a fedélzeti FPV kamera segítségével is. Visszanézve eléggé meglepett mind az FPV kamera mind a Feelcam, sokkal rosszabb képminőségre számítottam.
A fedélzeti FPV kamera felvétele
Az XF power akkuk hatására a gép magára talált. Hirtelen fürge lett és gyors, mint egy bepaprikázott veréb vagy egy Redbullon tartott denevér. (Azok a fülek! :D) Ezekkel az akkukkal a gyári kamerának ugyan érződik a súlya, mégsem tűnik olyan dögnehéznek mint a gyári akkuval. Azonban ez az akku sokkal vékonyabb keresztben és sokkal magasabb, így eléggé nyögve-nyelős rögzíteni rá a kamerát, aminek az elejét így is, úgy is fel kéne stócolni, hogy nagyobb tempóban ne a földet bámulja. Annyi baj legyen, átkerül majd a nagyobb kopterokra, amelyek hálásak lesznek, hogy alig 10g-al terhelem őket a Runcam HD 40g-ja helyett.
 Különböző csavarok, túlérzékeny gyro, nem balanszolt propellerek. Csaj jó lehet ugye? Mindegy, Batamanfül!
Különböző csavarok, túlérzékeny gyro, nem balanszolt propellerek. Csaj jó lehet ugye? Mindegy, Batamanfül!
Arra lettem figyelmes, hogy a gép motorjai 3/4 fordulatnál kellemetlenül rezonálnak. Nem tudtam, hogy miért, aztán észre vettem, hogy a tíz mellékelt csavarnak nem egyforma a feje, a leghangosabb motornál pedig pont két különbözőt használtam. Ezt cserélve a gép hangja egyből kulturáltabb lett, habár némi rezonálás még így is hallható, de nem vészes.
Gyakorlati tapasztalatok és tartósság az első ütközésig
A gép az alap PID-ekkel meglepően jól repült stabilizált módban, de e legfontosabb, hogy ACRO-ban is nagyon adta. A CF-ben később csak az EXPO-n reszeltem - a pitch/roll expo-nál a pöckök kitérésének végpontjait 90-ről felraktam 100-ra, valamint a gázgörbét a szokásos homorú helyett domborúra vettem, hogy alacsonyabb gázállásnál is legyen elég erő. Ezen kívül még a roll/pitch sebességét feljebb tornáztam, hogy egy bukfenc ne tartson fél napig.
Vajon átfér a pad alatt? Naná! Többször is! :D
Az irányítás eléggé pontos, a gép eléggé fürge. Ehhez hozzájön, hogy a 130-as váznak köszönhetően pici is, így szinte bárhol elfér. Nyugodtan lehet vele padok alatt / fölött / között röpködni. Ha a 1105-ös motorok 4000kV helyett 5200kV-sak lennének, azt mondanám, hogy szinte tökéletes a gép, így viszont néha erőtlennek hathat egy extrémebb manővernél.
Az első másfél hétben nem sikerült betont vagy aszfaltot fognom, pedig higgyétek el, eléggé próbáltam. Fatörzs, faág, pad és vascső viszont nem okozott gondot a karbon váznak és a pici motoroknak, ütközés után maximum a propeller hajlott el, amit visszahajlítva folytatódhatott a móka.
Repülési tulajdonságok az első ütközés után, avagy a túlérzékeny giroszkóp átka
Egy nem túl durva odacsapás után meg akartam reptetni a gépet, de a kamerakép úgy remegett, hogy majdnem behánytam. Szerencsére a róka bent maradt, én pedig futólépésben cseréltem a propikat. A helyzet picit javult, de a Rudi még mindig körbe akart nézni.
Kellemetlenül remeg a kép még némi vajákolás ellenére
Elővettem a másik Racer 130-at, az már a dobozból kivéve ugyanúgy jello-zott. Soft mountoltam, azaz 2 milis gumikarikákkal rezgéscsillapítottam a repvezérlőt, de szinte semmit sem segített. Végigzongoráztam a PID-eken, semmi. Felraktam a Betaflightot, semmi. Megtekertem a Betaflight filtereit, semmi. Ja, de nagyobb lett a késleltetés. :P Végül csak a motorok soft mountolása segített. Mostmár csak a gázkar középállásában van egy kis enyhe remegés, de menet közben szinte észre sem vehető. És bizony mondom néktek a softmount hatására eltűnt a felső tartományban hallható rezonancia, így már kész élvezet nyélgázon csapatni a géppel, amihez a fedélzeten a Betaflight 3.1.7 asszisztál. Ha jellemezni kéne a gépet egy szóval, azt mondanám fasza. Pontosabban:
Fasszaa! (a végén megnyomva kaján vigyorral, jobb hüvelykujjat feltartva)
A softmount megtette hatását, így ennek örömére körberepültem magam!
Ez az eset megtanított, hogy bizony nagyon körültekintően kell repvezérlőt választani, mert az MPU6500 gyroval szereltek nagyon háklisak a géptestben fellépő rezonanciára, és minden pici zajt nagyon csúnyán megbosszulnak. Mivel a Babyhawk MPU9250-es gyro-ja is MP6500 alapú, így azzal is meggyűlt a bajom, amikor a kocsonya szilárdságú biliműanyagból átépítettem karbonvázba, így rezgéscsillapításnak, azaz a soft mountingnak egy külön cikket fogok szentelni.
És még valamit tanultam, mégpedig azt, hogy sikítva meneküljek az ócska szénacél csavaroktól!!! Volt pár csavar, ami az első kitekerésnél tönkre ment, olyan puha anyagból volt. Az EMAX nem véletlenül szereli minden gépét rozsdamentes acélcsavarokkal, még a pöttöm Babyhawkot is!
Kell egy ilyen, mit tehetek?
Ha megtetszett ez a masina, akkor megfontolandó alternatíva lehet az eredeti Tarot TL130H1, amiről a Racer 130-at koppintották. Azonban az öregecske Naze32 rev. 6 az ideges MPU6500 gyróval nekem nagyon nem gyere be, így én inkább valami modernebb iránt kutatnék.

Tarot TL130H1, forrás: Banggod.com
A Kingkong Flyegg 130 kimondottan kellemes masinának tűnik. A maga 78g-jával 20g-al könnyebb a Racer 130-nál és ugyanúgy 1105-ös motorokkal van szerelve, de ezek már 7500KV-osak 4000KV helyett, így kétcellás akkuval is elég fürge lehet.
 Kingkong Flyegg 130, forrás:Banggod.com
Kingkong Flyegg 130, forrás:Banggod.com
Kicsit kisebb méretben érdekes alternatíva lehet a Kingkong 110GT, még kisebb méretben pedig az Emax Babyhawk, amiről a Babyhawk tag alatt találjátok az írásaim.
 Kingkong 110GT, forrás:Banggod.com
Kingkong 110GT, forrás:Banggod.com
Arra viszont figyeljünk, hogy minél kisebb a gép, annál jobban esik a gépek effeketivitása. Míg a Racer 130-al keményebb tempónál megvan a 3-3,5 perc, addig a Babyhawknál örülök a 2 percnek, hiába faragtam róla további 4g-ot.
Időközben a Babyhawk is elkezdett rosszalkodni a gyro miatt, így már készül a softmountos cikkem.
Ha tetszett a bejegyzés dobj egy lájkot YouTubeon vagy Facebookon! Köszi!




